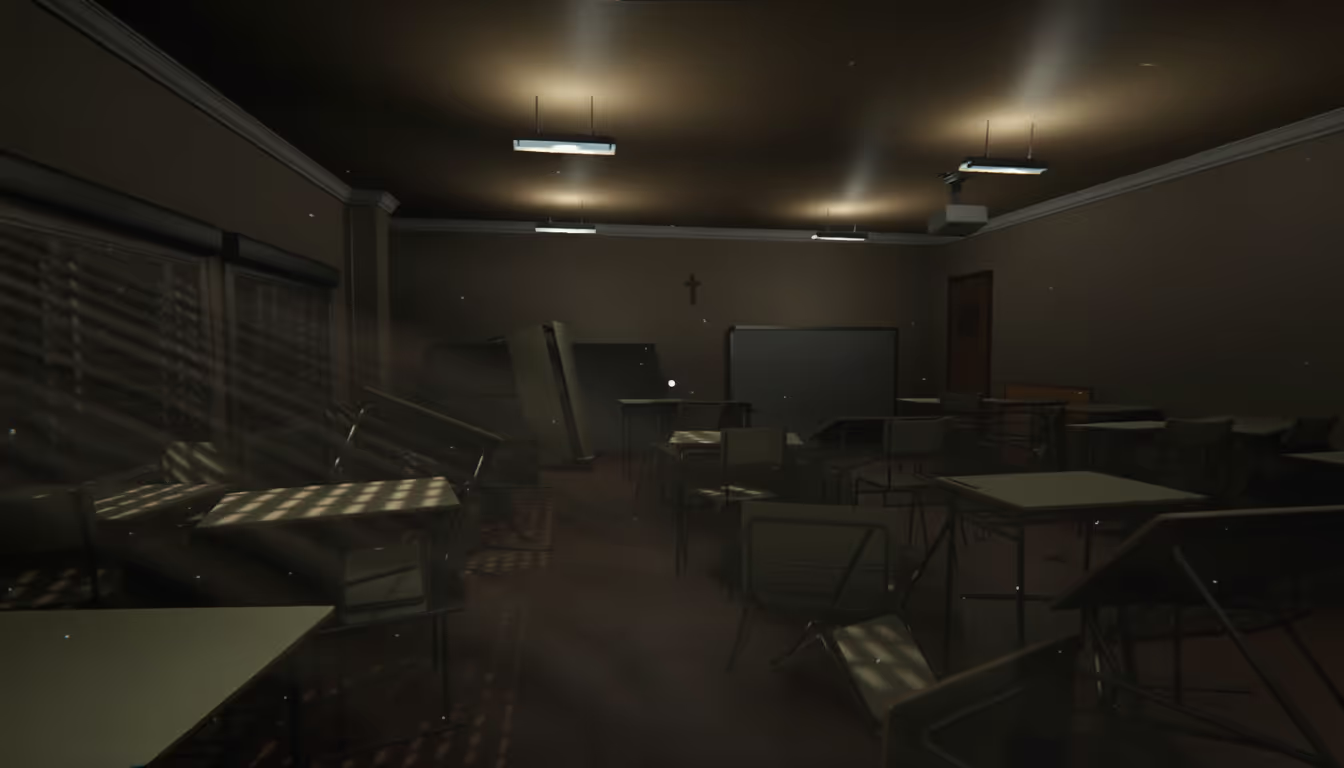
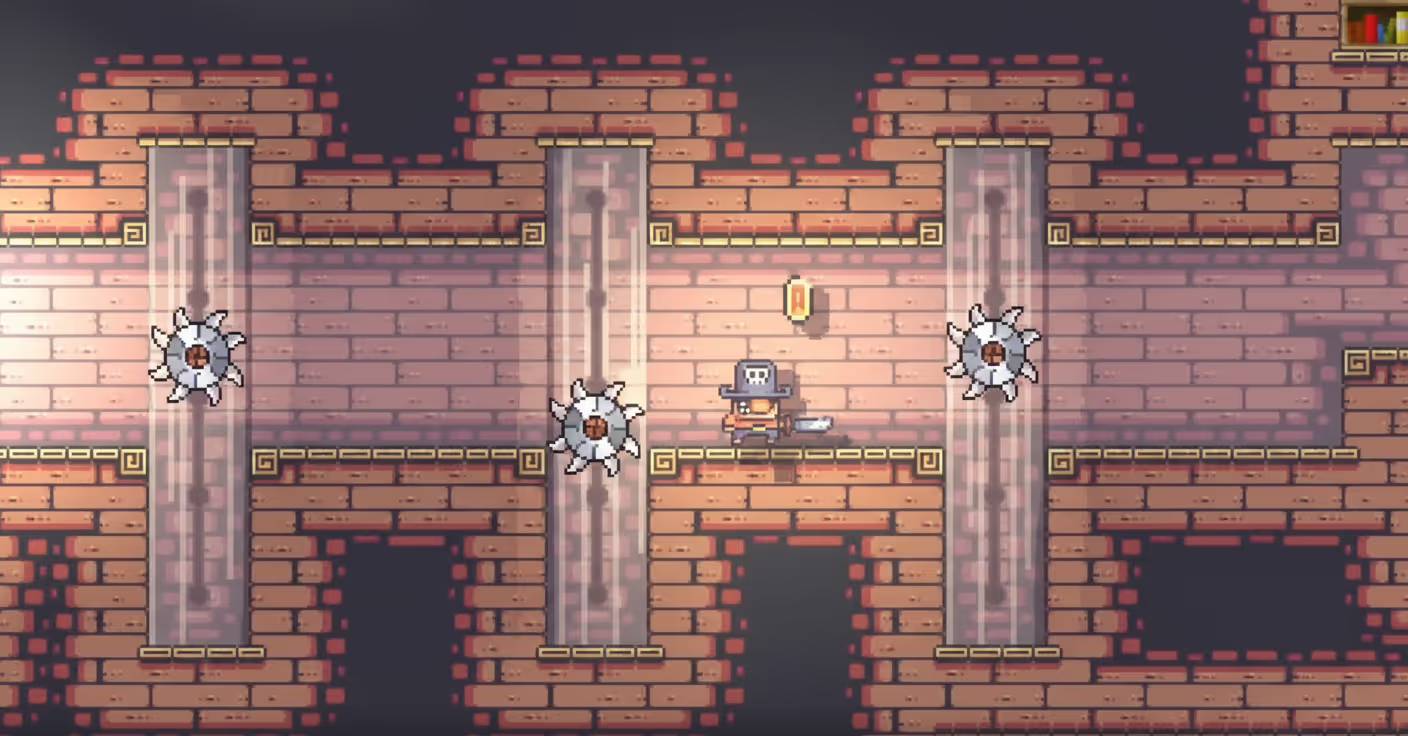
Specialized in programming gameplay and systems, with a focus on writing clean, efficient code and building immersive experiences in Unity. I have worked on both 2D and 3D projects, including VR and realistic horror, always leveraging my strong background in C# and my passion for creative problem-solving and technical innovation.